



AAU-11 姿態角度檢測陀螺儀裝置
輸出姿勢角的姿勢角演算裝置。
產品特性
- 高精度計算滾動/俯仰角
- 通過速度輸入進一步提高性能
- 通過MEMS技術,AAU-11與採用RLG和FOG的角度運算裝置相比,實現了小型、高耐久性。
| 條目 | 值 | |
|---|---|---|
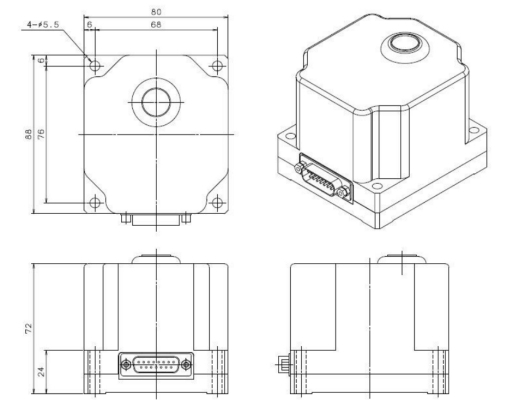
| 機械特性 | 占地面積 [mm] | 88×80 |
| 重量 [gram] | 700或更少 (TBD) | |
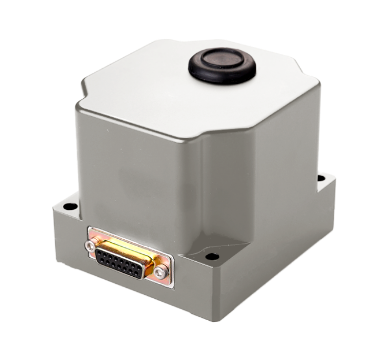
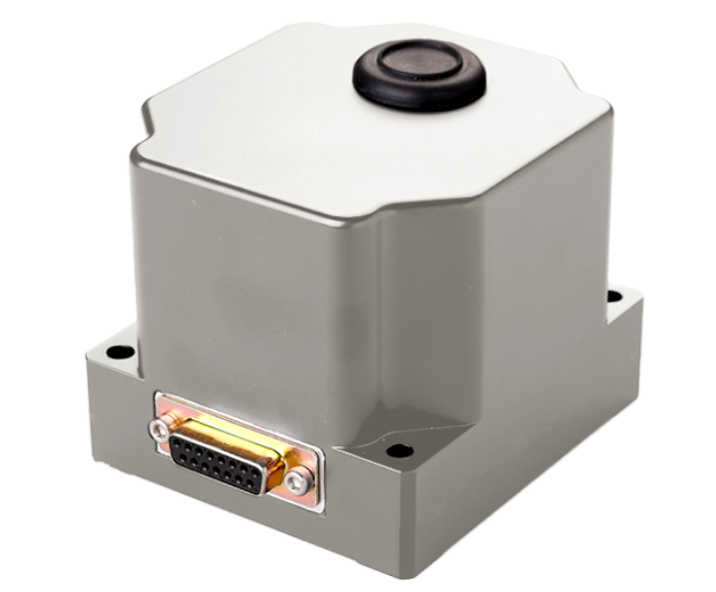
| 連接器 | D-Sub15針 | |
| 電特性 | 工作電壓 [V] | 7.5~30(Typ.12) |
| 功耗 [W] | <1.5 | |
| 使用條款 | 溫度環境 (操作/保存) [°C] | -25~85 |
| 溫度環境 (性能) [°C] | -10~70 | |
| 濕度環境 [%RH] (非冷凝) | <85 | |
| 振動衝擊 | IEC 61373 (JIS E4031分類2) | |
| 通信規格 | 通信方式 | CAN/RS422 (可切換) |
| 數據輸出周期 [Hz] | 200/100※ (可切換) | |
| CAN波特率 [bbs] | Typ.1,000,000 | |
| RS422波特率 [bps] | Typ.460,800 | |
| 速度脈衝輸入規範 | 符合RS422標準 | |
| 測量範圍 | 側滾角度 [°] | <±180 |
| 俯仰角 [°] | <±90 | |
| 偏轉角度 [°] | <±180 | |
| 靜態角精度 | 側滾角度 [°rms] | <±0.1 |
| 俯仰角 [°rms] | <±0.1 | |
| 偏轉角 [°rms] | 參考輸出 | |
| 動態角度精度 | 側滾角度 [°rms] | <0.5 |
| 俯仰角 [°rms] | <0.5 | |
| 偏轉角 [°rms] | 參考輸出 | |
| 角速度 | 測量範圍 [°/S] (側轉角/俯仰角/偏向角) |
±200 |
| Scale Factor Error [ppm] (側轉角/俯仰角/偏向角) |
<±500 | |
| Bias[°/h rms](X/Y/Z) | <±20 | |
| 加速度 | 測量範圍g (X/Y/Z) | ±10 |
| Scale Factor Error[ppm] (X/Y/Z) |
<±500 | |
| Bias[mg](X/Y/Z) | ±1.5 | |
※100Hz輸出會降低陀螺儀輸出的雜訊性能。(角度輸出精度不受影響。)