


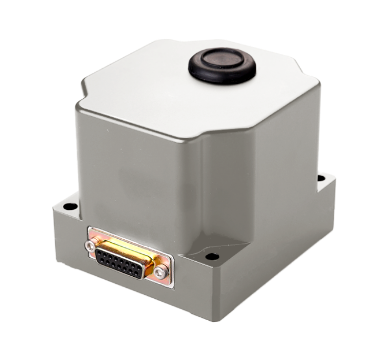




AAU-11 Attitude angle detector gyro unit
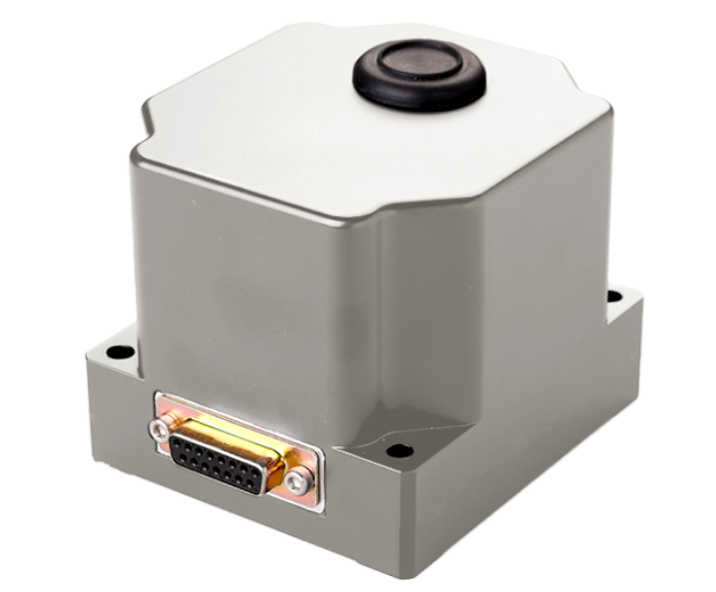
AAU-11 is an attitude angle detector gyro unit that can output attitude angle
Product Features
- Calculating roll/pitch angle with high accuracy
- Performances can be improved with velocity input
- By applying MEMS technology, AAU-11 is smaller, tougher, and less expensive than Angle Arithmetic Unit using RLGs or FOGs
| Item | Value | |
|---|---|---|
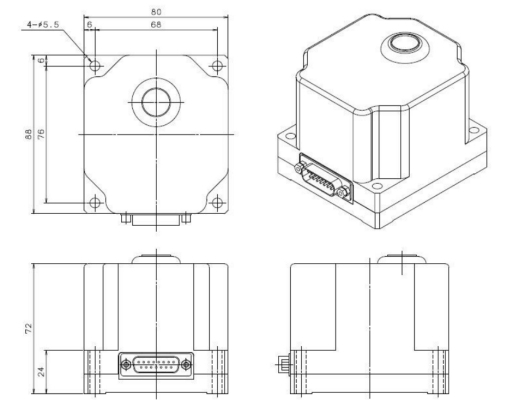
| Mechanical Characteristics | Size[㎜] | 88×80 |
| Weight[gram] | ≺700(TBD) | |
| Electrical interface | D-Sub15 | |
| Electrical Characteristics | Power supply[V] | 7.5~30(Typ.12) |
| Power consumption[W] | <1.5 | |
| Operating Conditions | Temperature range (operation/storage)[℃] | -25~85 |
| Temperature range(performance)[℃] | -10~70 | |
| Humidity environment [%RH](No condensation) | <85 | |
| Vibration・Shock | IEC 61373 (JIS E4031区分2) | |
| Communication protocol | Communication specification | CAN/RS422(Switchable) |
| Data output cycle[㎐] | 200/100*(Switchable) | |
| CAN baud rate[bbs] | Typ.1,000,000 | |
| RS422 baud rate[bps] | Typ.460,800 | |
| Speed pulse input format | RS422 | |
| Measuring range | Roll[°] | <±180 |
| Pitch[°] | <±90 | |
| Yaw[°] | <±180 | |
| Static angular accuracy | Roll[°rms] | <±0.1 |
| Pitch[°rms] | <±0.1 | |
| Yaw[°rms] | Reference output | |
| Dynamic angular accuracy | Roll[°rms] | <0.5 |
| Pitch[°rms] | <0.5 | |
| Yaw[°rms] | Reference output | |
| Angular velocity | Measuring range[°/S] (Roll/Pitch/Yaw) |
±200 |
| Scale Factor Error[ppm] (Roll/Pitch/Yaw) |
<±500 | |
| Bias[°/h rms](X/Y/Z) | <±20 | |
| Acceleration | Measuring range[g](X/Y/Z) | ±10 |
| Scale Factor Error[ppm] (X/Y/Z) |
<±500 | |
| Bias[㎎](X/Y/Z) | ±1.5 | |
* When the output frequency is 100Hz, the noise performance of the gyro output will deteriorate (The angle output accuracy is not affected)
Product Applications
- Autonomous operation of agricultural machinery
- Monitoring of bullet trains and construction machinery
- Attitude control of robotic arms
- Smart agriculture


