



Northfinder™/
GCAH-12C
Attitude and Direction Reference System (MEMS-AHRS)

Real-time attitude and heading angles are output without GPS
Product Features
- Achieves a more compact size, higher durability, and lower cost compared to RLG and FOG products by adopting MEMS gyroscopes
- Automatically calculates attitude and heading based on inertial sensor outputs
- Outputs real-time attitude orientation even in a area where GNSS is not available
Product Applications
- Excavation applications, buried pipe investigation
- Inertial navigation systems for aerospace and marine vehicles
- Automatic control for railways, automobiles, and industrial equipment
| Item | Value | |
|---|---|---|
| Static angles Azimuth | Range | <±180° |
| Accuracy | < ±0.8°x (cos λ·cos θ)-1(1σ)(λ : Latitude) *1 | |
| Attitude | Range | Pitch(θ) : ±90°, Roll(φ) : ±180° |
| Offset error | Pitch: <0.1°rms,Roll: <0.1°rmsx (cos θ)-1 | |
| Repeatability | Pitch : < 0.02°(1σ),Roll : < 0.02°x (cos θ)-1 (1σ) | |
| Dynamic angles Azimuth Attitude |
Error | < 0.5°max (Without angle drift) |
| Resolution | < 0.05° | |
| Angle drift | < 2°/h max | |
| Settling time | 1.5 minutes (static conditions) | |
| Electrical Interface | D-sub 15 | |
| Communication protocol | RS-422 (Baud rate: 230.6 kbps) | |
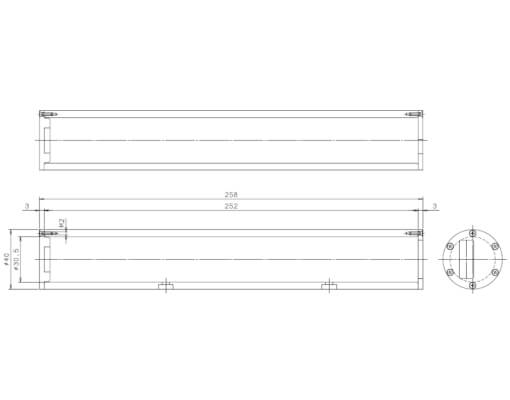
| Size & Weight | Housing 36 x 43 x 266 mm (Φ30 x 257 mm), 0.7 kg | |
| Power supply voltage | 6.5 to 24 VDC (Typical 12 VDC) | |
| Power consumption | < 1.5 W | |
| Temperature range | -20 to 65 ℃ (use & storage) | |
* 1 Target rms value