



AAU-11 姿勢角検出ジャイロ装置
姿勢角を出力する姿勢角演算装置です。
製品の特長
- 高精度にロール/ピッチ角を演算
- 速度入力することで更に性能が向上
- MEMS技術により、AAU-11はRLGやFOGを用いた角度演算装置に比べ小型・高耐久を実現
| 項目 | 値 | |
|---|---|---|
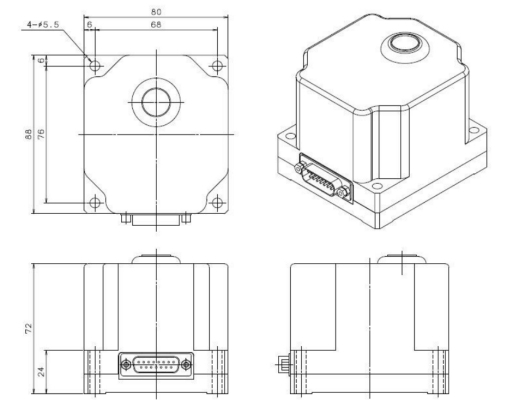
| 機械的特性 | フットプリント[㎜] | 88×80 |
| 重量[gram] | 700以下(TBD) | |
| コネクタ | D-Sub15ピン | |
| 電気的特性 | 使用電圧[V] | 7.5~30(Typ.12) |
| 消費電力[W] | <1.5 | |
| 使用条件 | 温度環境(動作・保存)[℃] | -25~85 |
| 温度環境(性能)[℃] | -10~70 | |
| 湿度環境[%RH](結露なし) | <85 | |
| 振動・衝撃 | IEC 61373 (JIS E4031区分2) | |
| 通信仕様 | 通信方式 | CAN/RS422(切り替え可能) |
| データ出力周期[㎐] | 200/100※(切り替え可能) | |
| CANボーレート[bbs] | Typ.1,000,000 | |
| RS422ボーレート[bps] | Typ.460,800 | |
| 速度パルカス入力仕様 | RS422準拠 | |
| 測定範囲 | ロール角[°] | <±180 |
| ピッチ角[°] | <±90 | |
| ヨー角[°] | <±180 | |
| 静的角度精度 | ロール角[°rms] | <±0.1 |
| ピッチ角[°rms] | <±0.1 | |
| ヨー角[°rms] | 参考出力 | |
| 動的角度精度 | ロール角[°rms] | <0.5 |
| ピッチ角[°rms] | <0.5 | |
| ヨー角[°rms] | 参考出力 | |
| 角速度 | 測定範囲[°/S] (ロール角/ピッチ角/ヨー角) |
±200 |
| Scale Factor Error[ppm] (ロール角/ピッチ角/ヨー角) |
<±500 | |
| Bias[°/h rms](X/Y/Z) | <±20 | |
| 加速度 | 測定範囲[g](X/Y/Z) | ±10 |
| Scale Factor Error[ppm] (X/Y/Z) |
<±500 | |
| Bias[㎎](X/Y/Z) | ±1.5 | |
※100㎐出力とする場合、ジャイロ出力のノイズ性能が悪化します。(角度出力精度に影響はありません。)