



コンセプトモデル
単系
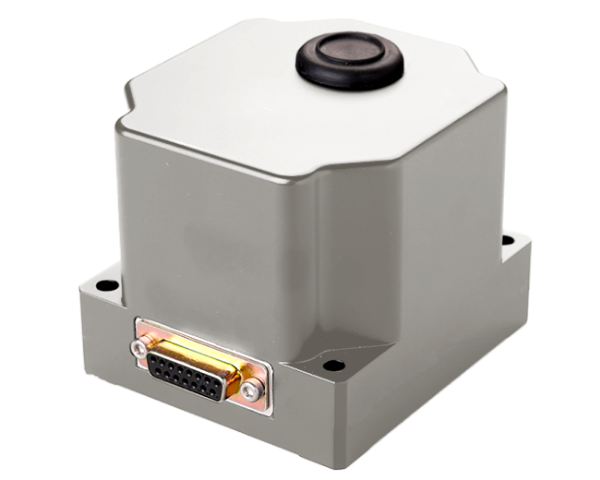
Wataridori 複合慣性航法装置(GNSS/INS)
WataridoriはNorthfinderを応用しGNSS/INSを実現した場合のコンセプトモデルです。
ご関心がございましたらお気軽にお問い合わせください。
製品の特長
- MEMS式ジャイロ/加速度センサとGNSS受信機を協調したGNSS複合慣性航法装置
- RLG、FOG式INSと比較して1/10以下の小型、軽量、低消費電力、低価格を実現し性能も同等レベル
- GNSS受信機はGPS/Galileo/GLONASS/BeiDou/QZSS/SBASといったほとんどの衛星に対応
- GNSSの測位ステータス及び信頼度(DOP)などを基に自動的に純慣性/GNSS複合慣性の切り替え可能
- GNSS信号の受信環境変化などへの順応性、ロバスト性がともに高い
製品の用途
- eVTOL、ドローンなどエアモビリティの姿勢モニタリング
- 航空宇宙や海洋移動体向け慣性航法システム
- 高精度な位置情報が必要な機器への搭載
- 移動機器のマッピング


Wataridori(GNSS/INS)について
GNSS/INSとは
INS(Inertial Navigation System :慣性航法装置)
ジャイロと加速度センサにより、プラットフォームの姿勢ヨー・ロール・ピッチ角 と位置、高度、移動速度、移動方向といった、プラットフォームの運動や現在位置を推定しながら目的地まで高精度にガイダンスする装置です。住友精密工業の INS は、小型軽量・低価格な MEMS(Micro Electro Mechanical Systems) 式のジャイロと加速度センサをそれぞれ 3 軸有しています。
GNSS(Global Navigation Satellite System:全地球航法衛星システム)
カーナビゲーションで有名なGPSというのは、米国が運営する航法衛星システムの固有名称で、GNSSは各国(欧州のGalileo、ロシアのGLONASS、中国のBeiDou、日本のQZSS)の航法衛星システムの総称となります。
GNSS/INSとは
民間航空に関する国際技術委員会、認証・標準化団体によると、GNSSと組合わせて使用するジャイロ応用機器については「GNSS Aided-」という表現が多く用いられています。日本における正式名称はまだ規定されていないようですが、「GNSS複合慣性航法システム」という名称が広く用いられています。つまりGNSS/INSとは、「GNSSの助けを受けて精度向上を図るINS」というアーキテクチャと考えられます。住友精密工業のGNSS/INSは「助けを受ける」という一方的かつ受動的な考え方ではなく、「INSとGNSS両方の状態を監視しながら、様々な条件判断によりGNSSのデータを利用するか決める」という能動的な方式を採用しており、この意味では『協調』という設計思想となっています。
INSに関する性能的問題
例えば、ある軸のジャイロ観測値を短時間(msec単位)で見ると、左図のようにノイズの影響でばらつきます。
ただし、このばらつきの平均値(中央値)が0であれば大きく深刻な問題にはなりません。
ジャイロ自体の発熱により電子の活性度が変わり、ばらつきが特定方向にシフトします。
同時に、平均値(中央値)も同じ方向に移動します。
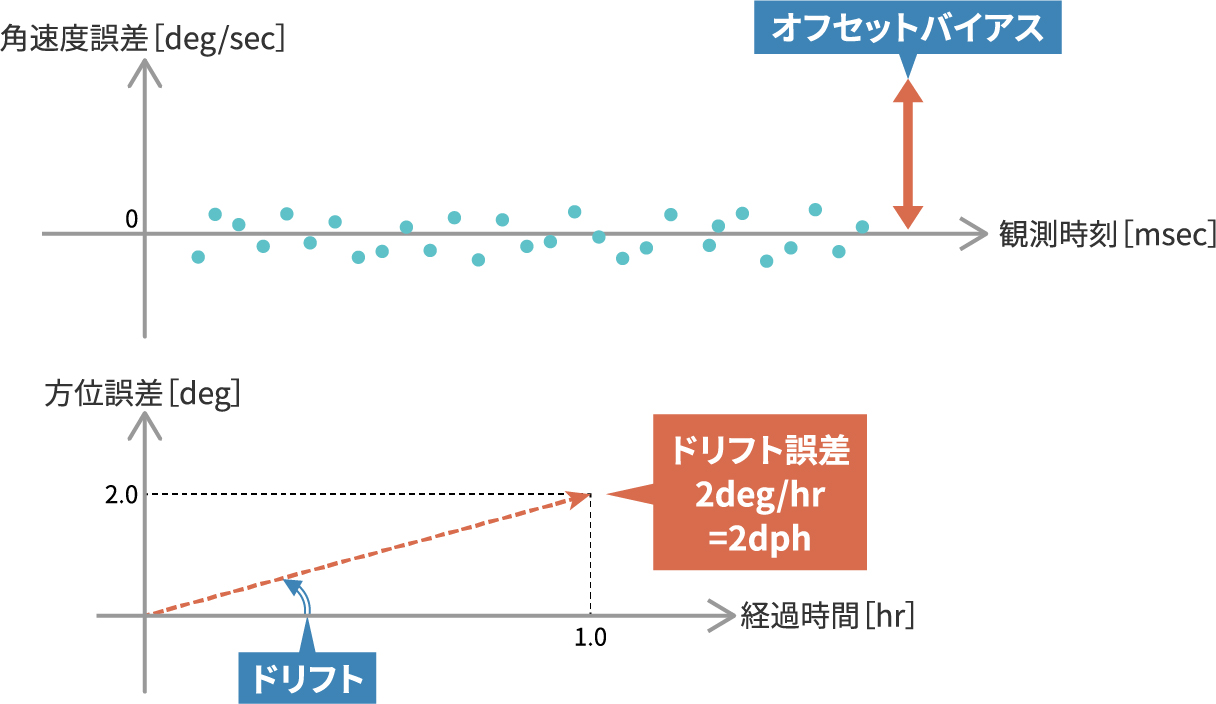
INS単体精度に起因するアプリケーション上の問題
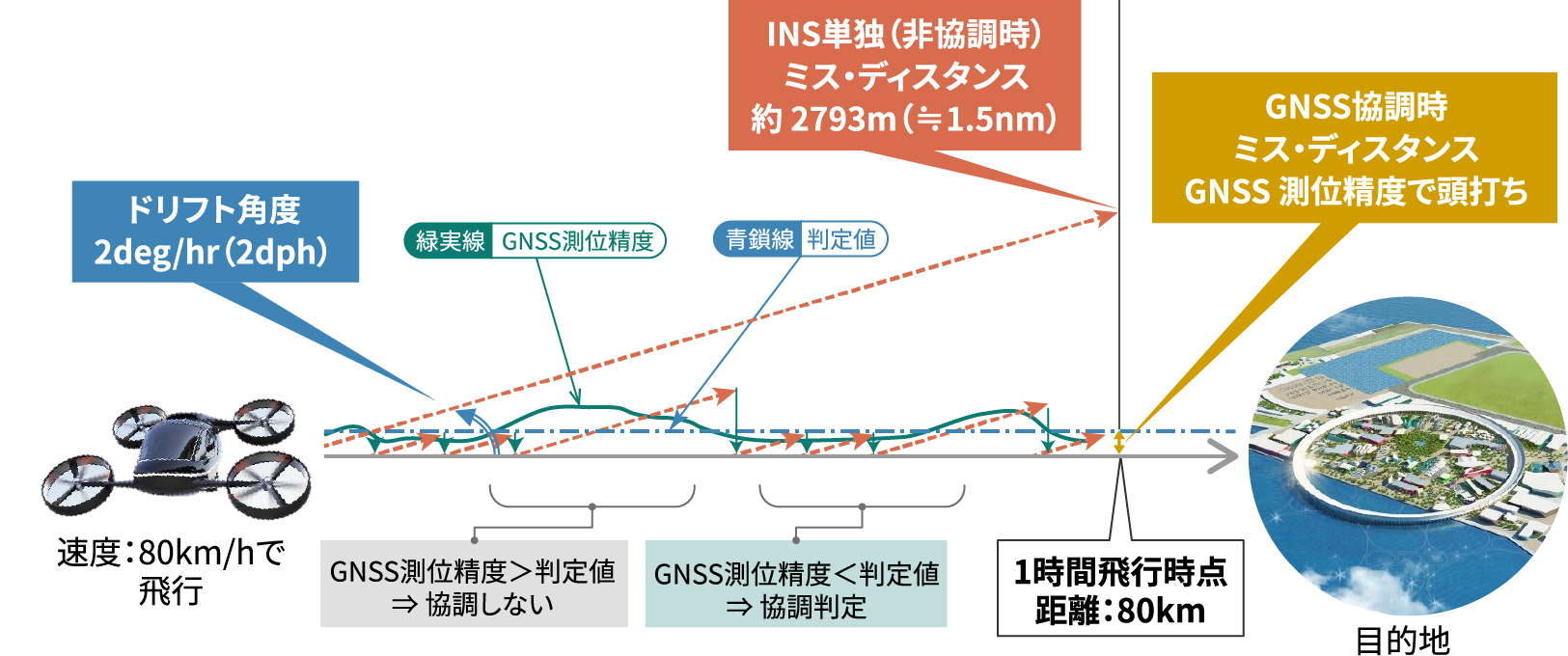
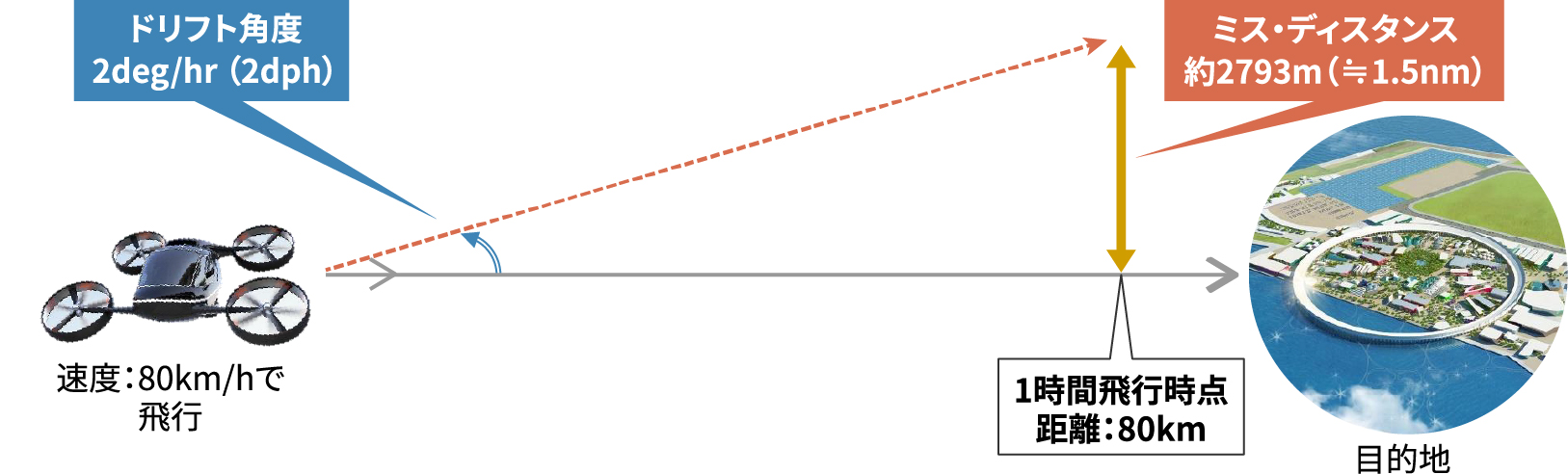
INSに生ずるドリフト成分により長期的角度誤差が発生します。
例えば、図のように2deg/hr(1時間に2°ずれる)のドリフト角度が発生するINSは、1時間の運航で約2,793mのミス・ディスタンス(距離誤差)をもたらします。
GNSSとの協調動作によるINSの高精度化
GNSSとINSが協調することで、INS単独で発生していたドリフト角度誤差の一方的増加を抑えることが可能です。
しかし、GNSSでは衛星配置や電波受信状況などにより、測位精度が時々刻々と変化します。GNSSの測位精度が悪い状態で協調すると、INSの精度が悪化するケースがあります。そのため、住友精密工業のGNSS/INSは、GNSSの測位精度を推定し、様々な判定を行い、協調するかどうかを判断することで、周囲環境などのダイナミックな変化にも柔軟に対応し、かつロバストな性能を実現しています。